13 - Mappings and Shadows
ucla | CS 174A | 2024-03-19 01:50
Table of Contents
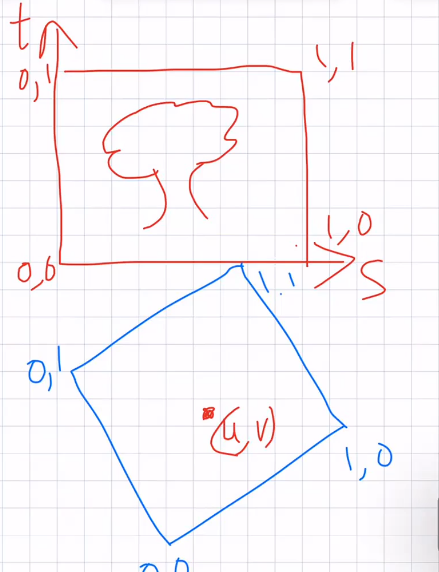
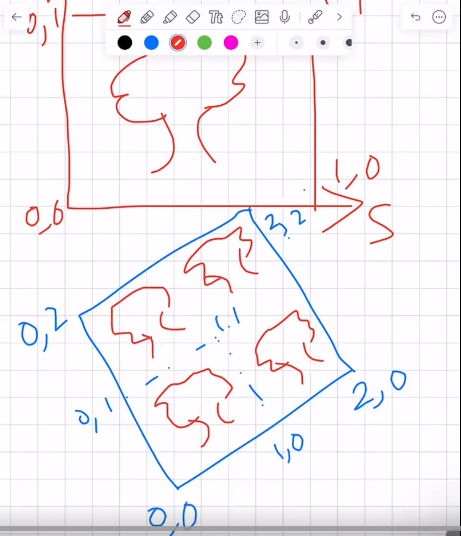
Texture Mapping
- pasttern mapping: wrap a pattern across a surface
- individual texture elements are Texels
- use texel color as diffuse color, index using
- index the surface using
Aliasing
- usually due to sampling too few points per pixel
- due to points sharing texels, we might miss the texture map and end up with useless colors:
- in this example we mapepd directly and everythign ended up white:
- in this example we mapepd directly and everythign ended up white:
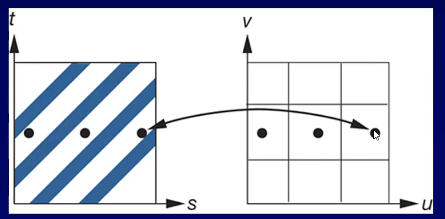
- we can anti-alias using area average sampling
- e.g., take a square and color the average of that texel:
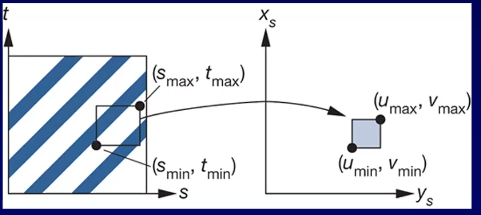
- e.g., take a square and color the average of that texel:
- or MipMap:
- displacement maps actually displace the objects a little based on the map
- B is the bump param that will usualyl given as a map per pixel or can be interp
- B>0 => raise it up
- B<0 => push it down
- changes the actual geometry of the object:
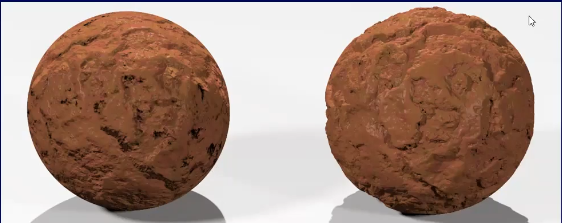
- bump mapping only changes the direction of the normals
- uses partial derivatives wrt to the surface/pixel index and point index
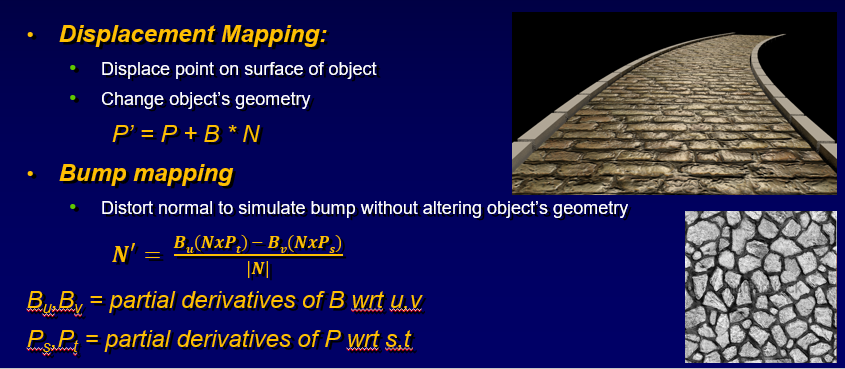
- uses partial derivatives wrt to the surface/pixel index and point index
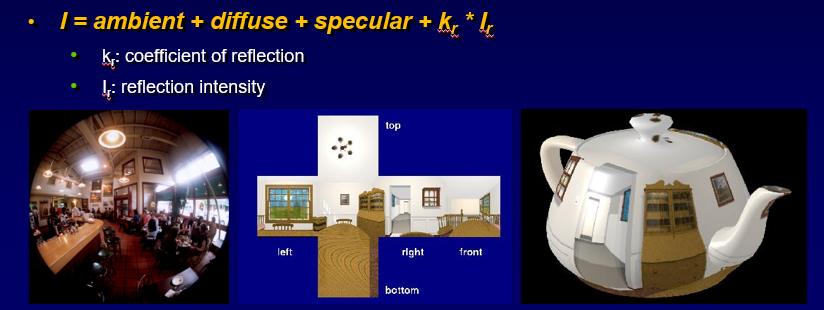
Environmental Mapping
- reflection mapping
- use polar/spherical coords of reflected ray to map environment
- use the reflected ray R (vector) to map based on the direction of R
- maps are usually cubic or spherical
Shadow Algos
- if a light ray does not touch the surface of a polygon/object, that point is in a shadow
- for object precision: shadow volume algo (old)
- for image precision: 2-pass z-buffer algo
- render shadows with ambient light
- mark shadows for specific light sources by running HSR from eye position
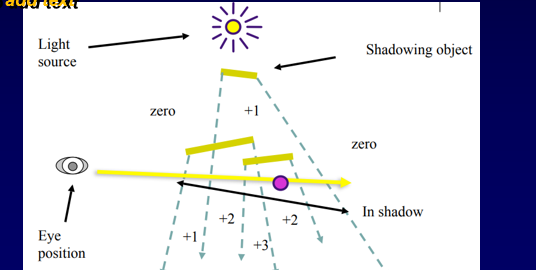
Shadow Volume Method
- create shadow volumes by tracing the 3d object made by the 2d front facing faces
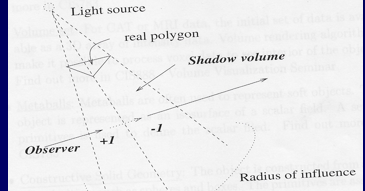
- add this shadow volume to database
- then do parity check to remove unnecessary volumes
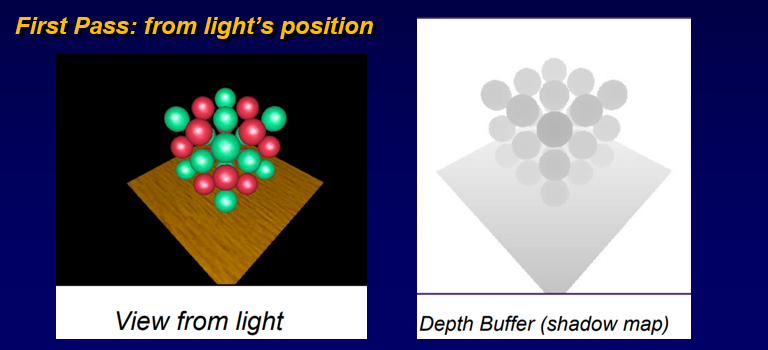
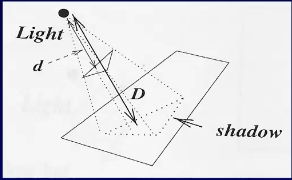
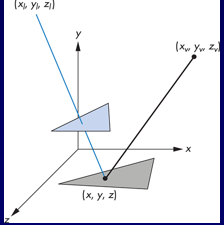
2-Pass Z-buffer
- treat each light source as a spotlight
- then calculate this z-buffers for each light
- 1st pass
- do z-buffer (2d full) from light position
- this z-buffer will give us the z-value of the closest polygons to the light at each pixel
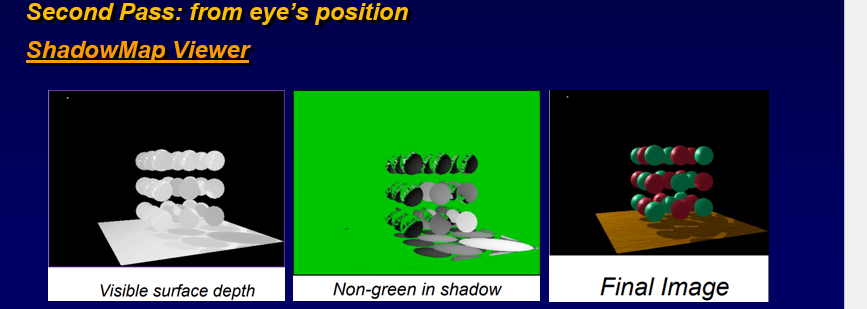
- 2nd pass
- do z-buffer (scanline or full) from eye position
- for each visible pixel in scan line
- check if the z-value that the poly’s object belongs to in WS is farther than the z-buffer at that coordinate
- if so, then it is in a shadow
- we check (x,y,z) and see that z > z_blue_polygon thus it is in shadow
- e.g.
- simple to implement
- BUT, regires large shadow buffer, depth buffer resolution usually 8-bit
- umbra and penumbra aliasing may happen if shadows are far from the light