5 - Constraint Satisfaction Problems
ucla | CS 161 | 2024-01-29 14:00
Table of Contents
Structure
- factored into parts, w/ percepts - solution can see the current state and make nondeterministic choices
Representation
- Variable:
- Domain:
- Constraints - also goal when all are met
Constraint Types
- Unary:
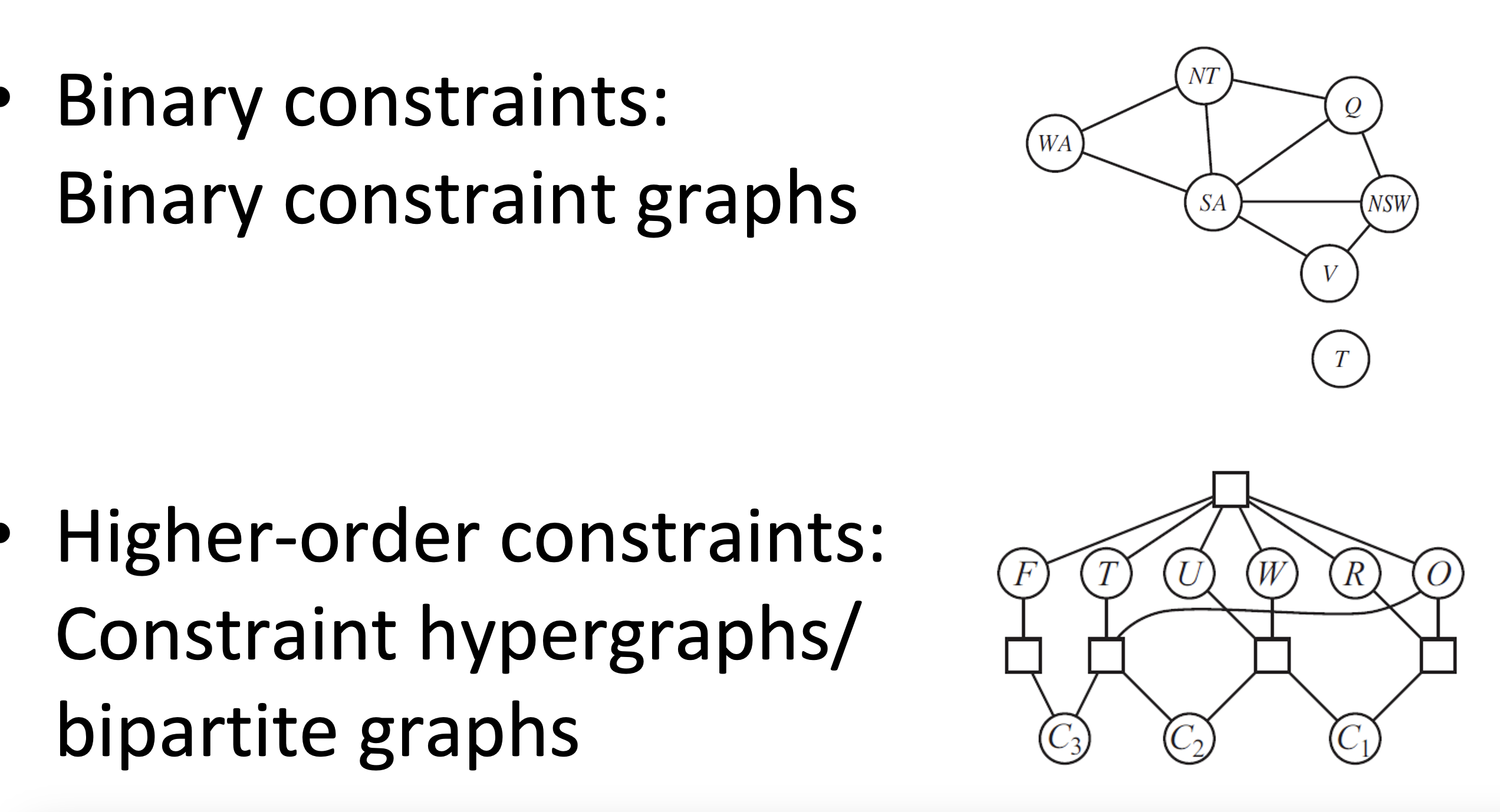
- Binary:
- Higher Order
- Linear Constraints
- Non-linear constraints
- Global constraints - domain restrictions
- Soft constraints - allowable by some variable,
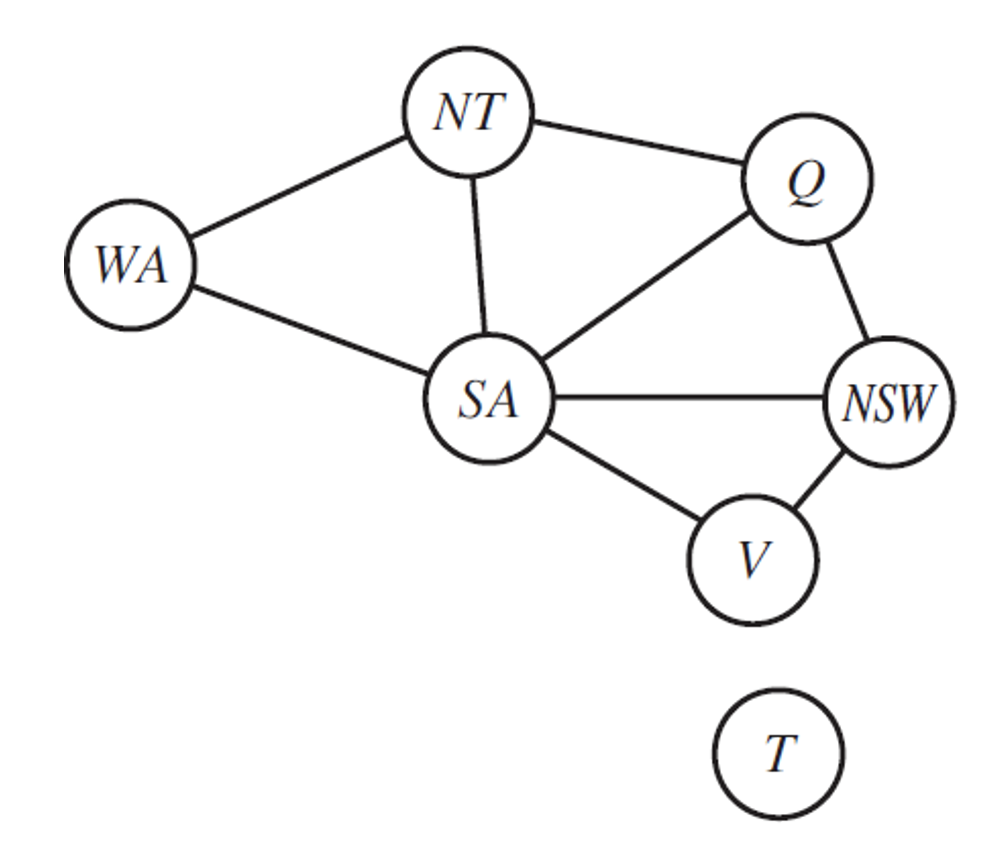
- an be represented as graphs
Solutions
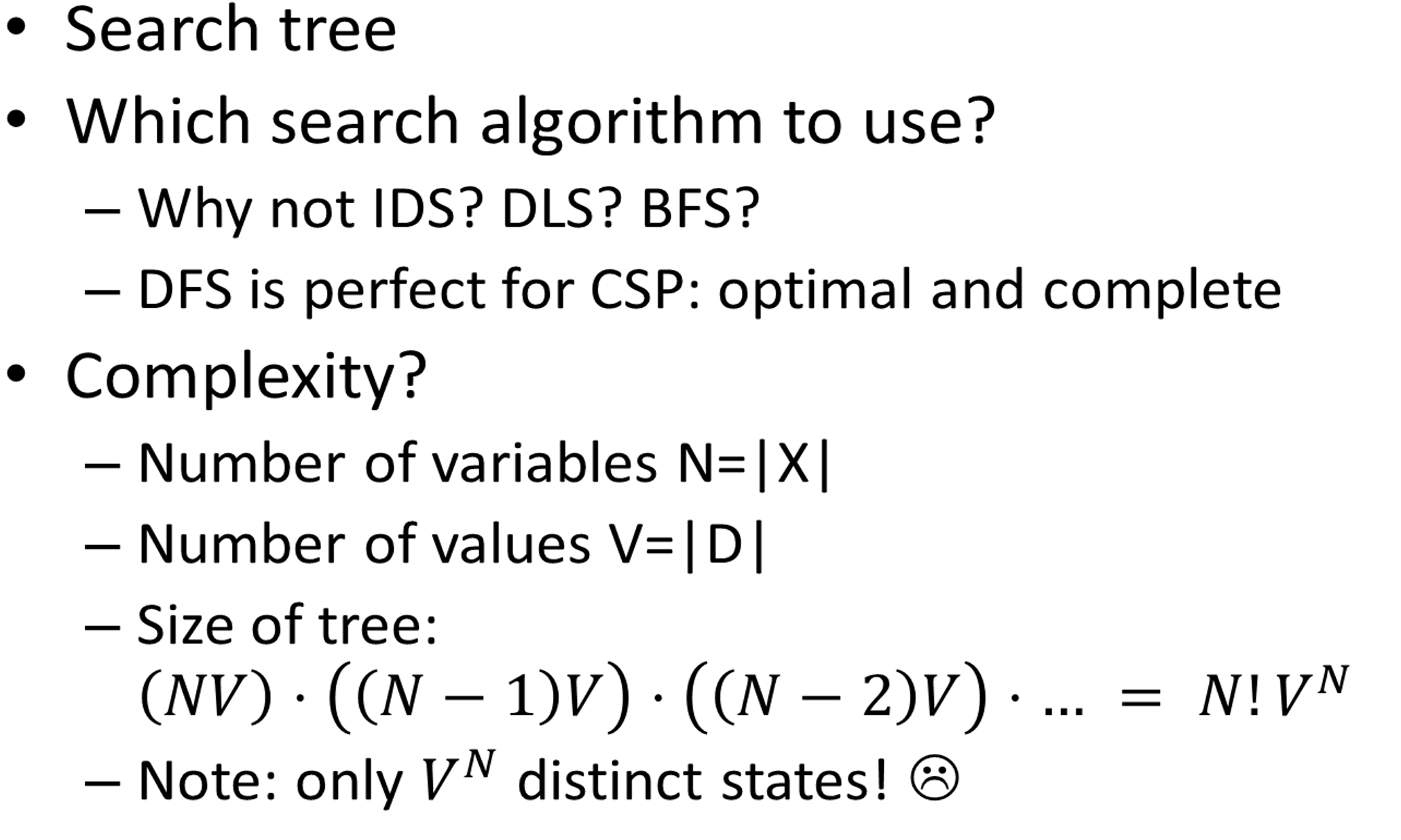
Naive Solution - DFS
- Formulation
- In this search tree, the depth is limited/finite, so just use DFS instead of IDS
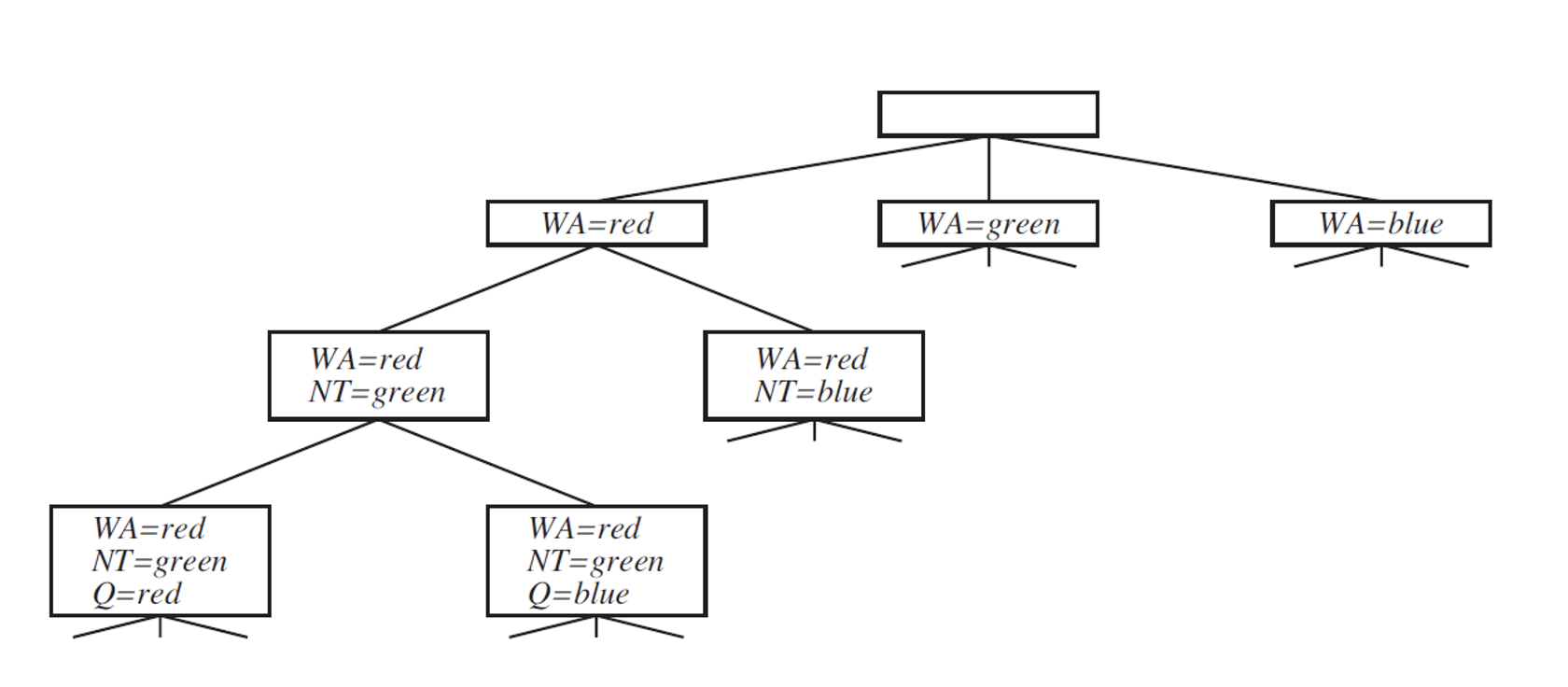
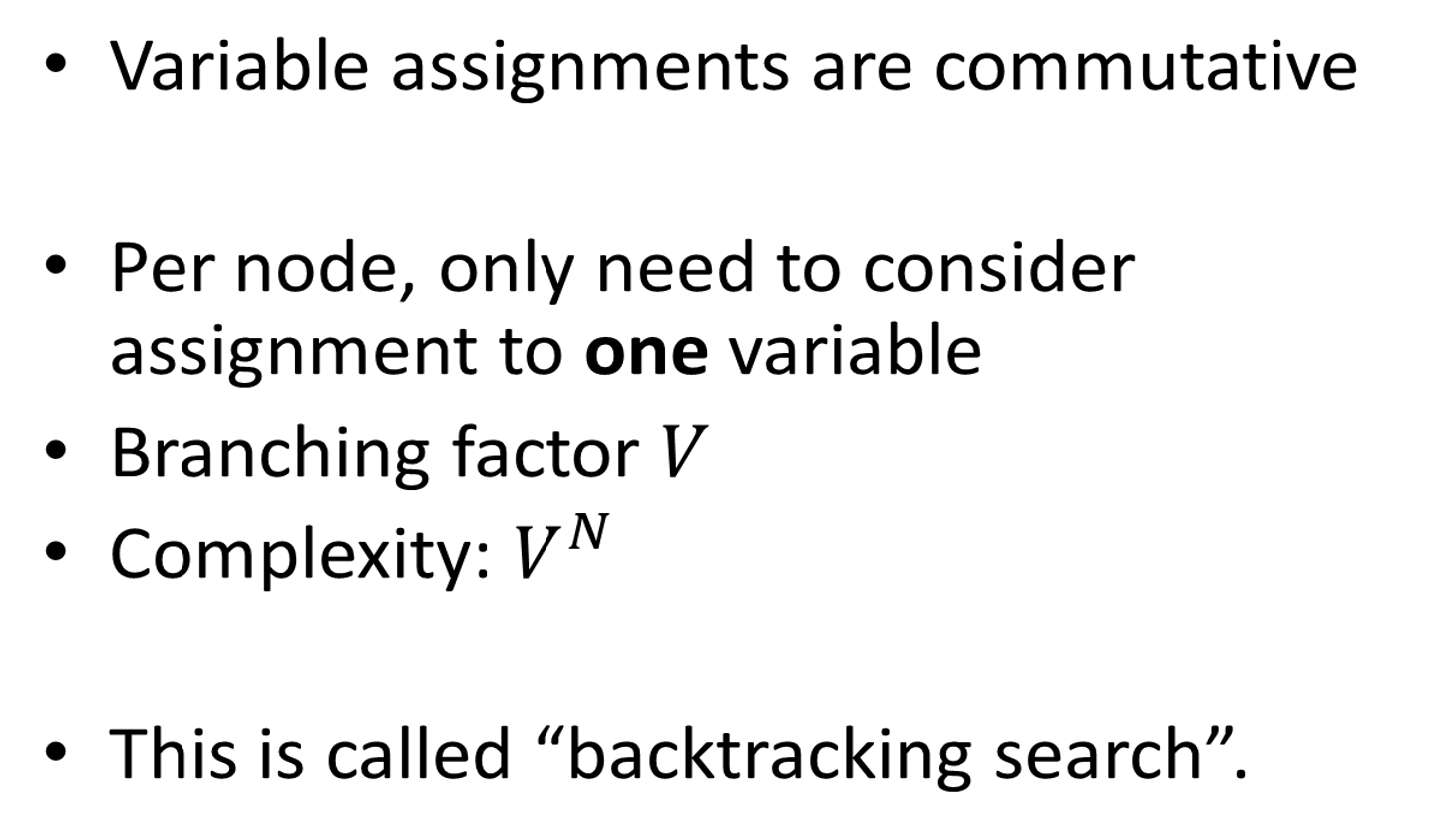
Backtracking search
- abuse commutative variable/actions to create a backtrakable tree
- limitation: baktraking can get bad, we can make it more efficient by checking whether the next action is legal and decide whether or not to take the current branch
- also we can look ahead to decide the order of seletion, e.g. color in order of touhing/constrained nodes isntead of randomly across the state space
Variable Selection Heuristics
Heuristics
- 1
- 2
- 3

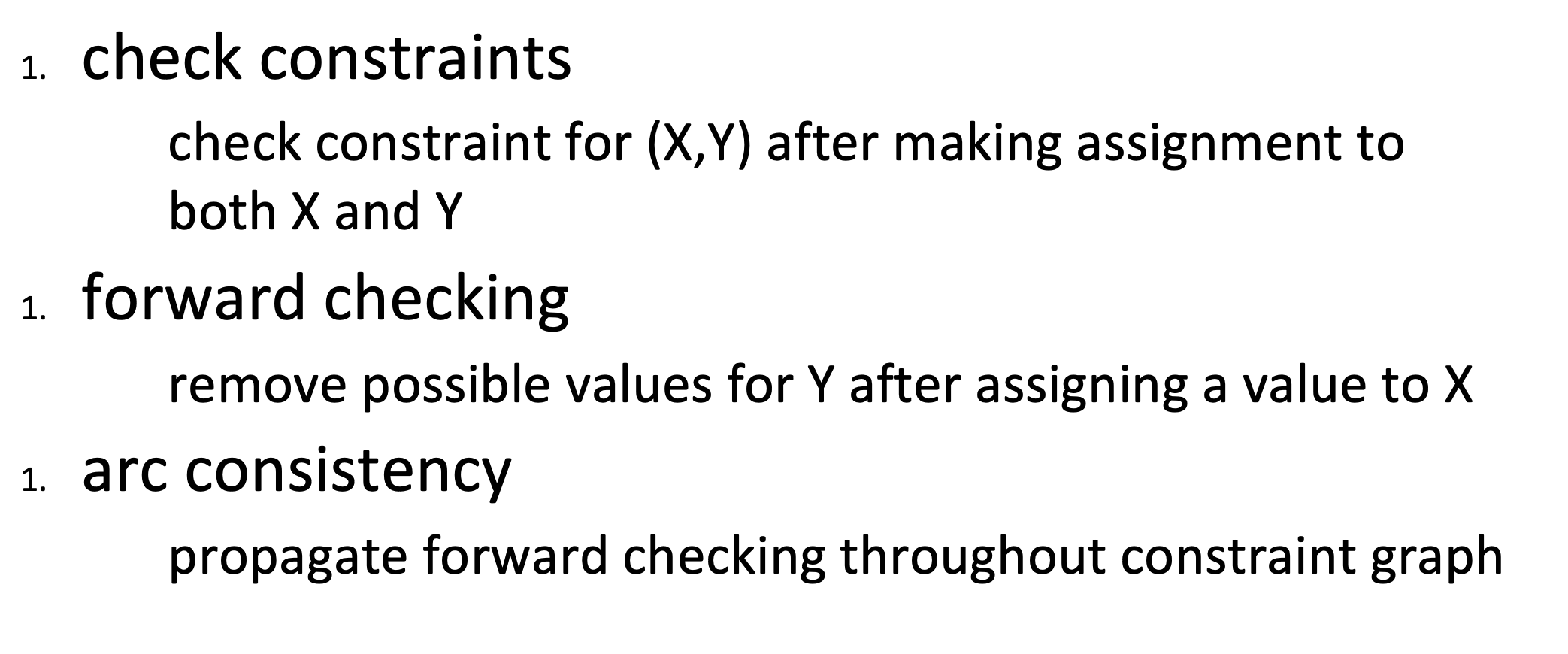
Forward Checking Algorithm
- look ahead to check the previous heuristics
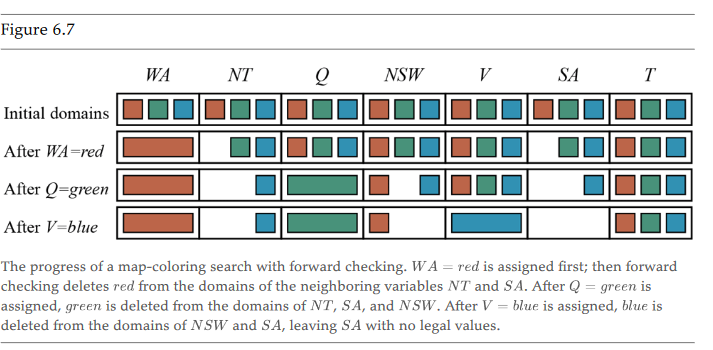
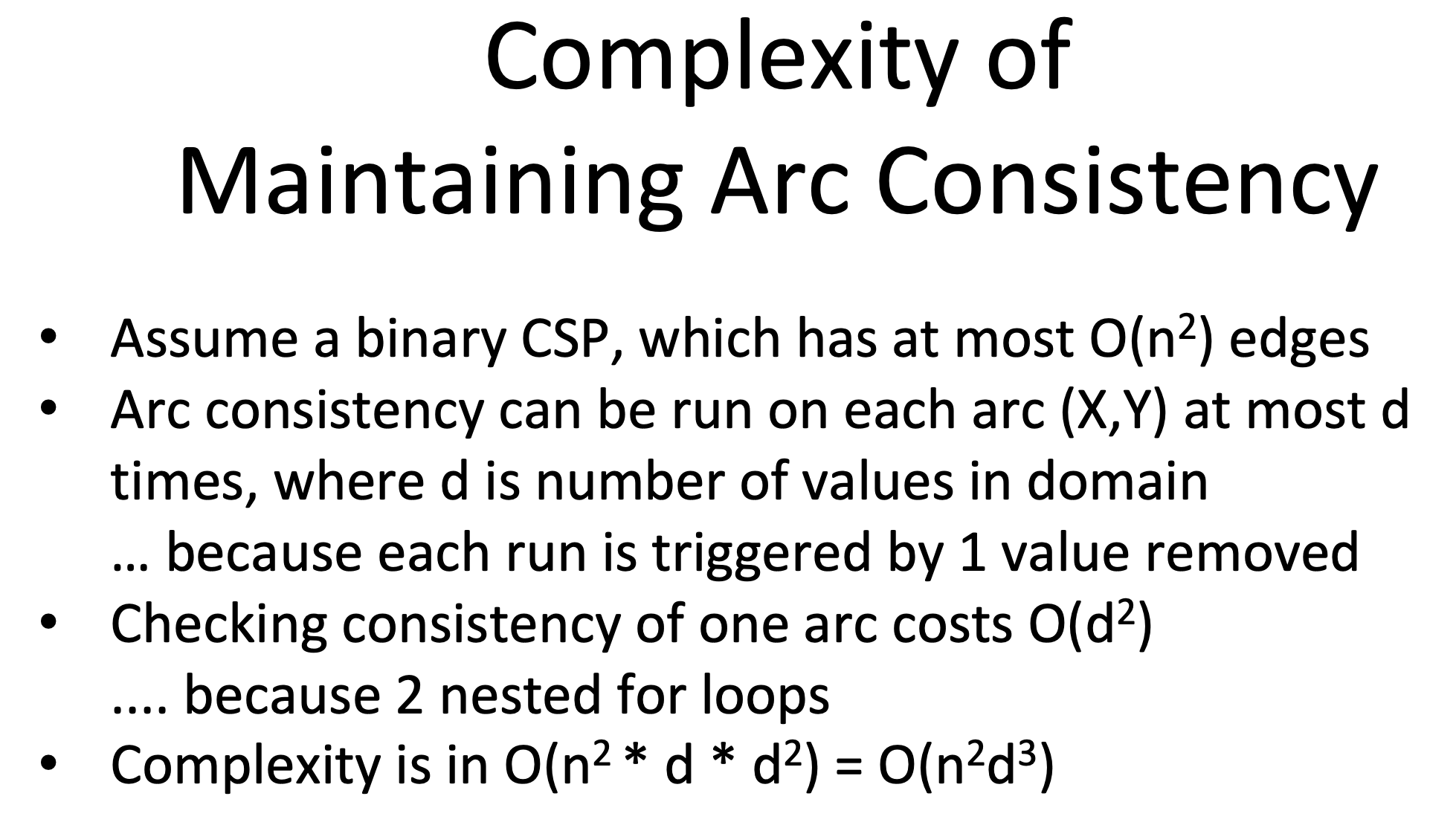
Arc Consistency Algorithm
- look ahead even further to check if the new heuristic constrains constrain other variables - i.e. higher-order search of searched values
- for an edge in the constraint graph, we look at
Exploiting Structure
- splitting a graph of
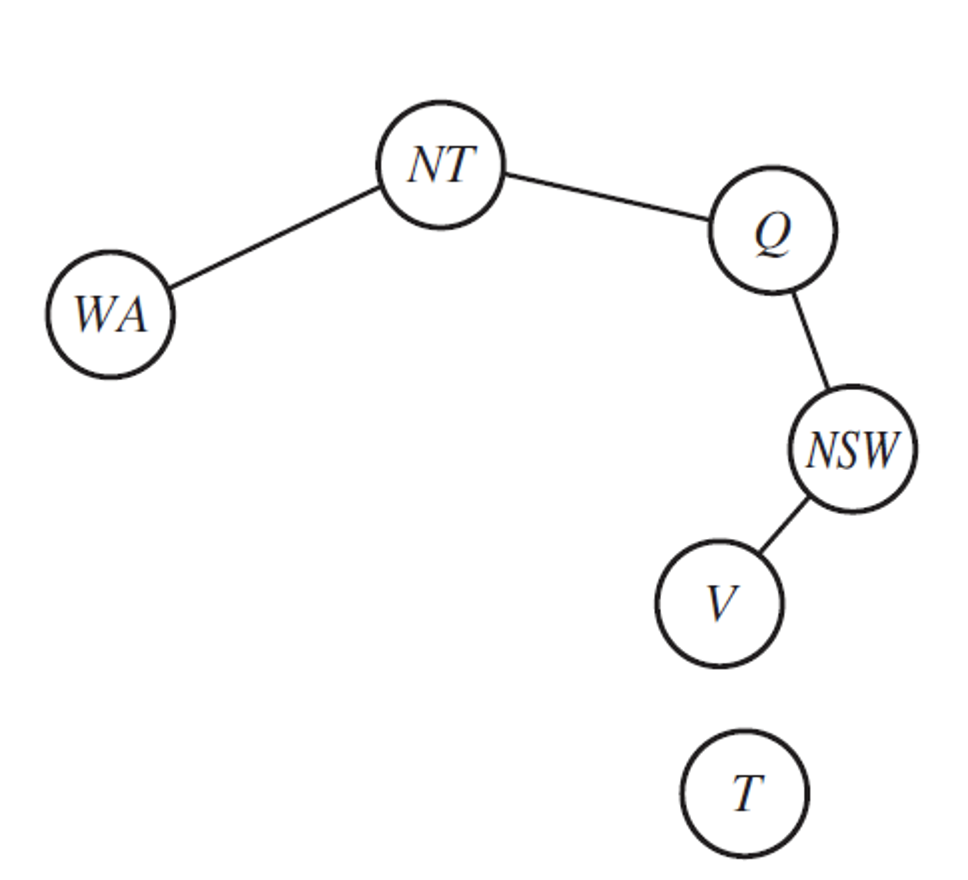
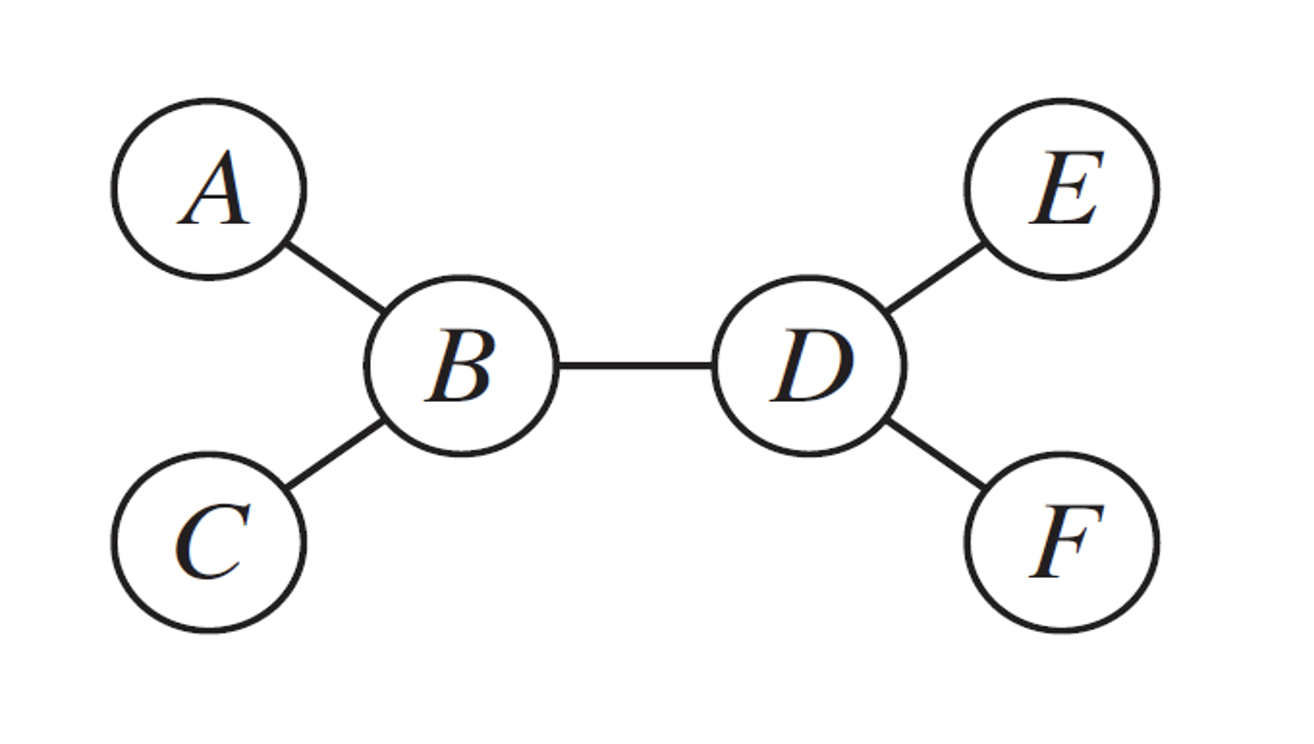
- constraint tree - faster Arc Consistency on only TREEs
- select some for the starting node, then communicate between nodes to decide available values
- once decided, run backwards based on the last selection (which is a forced selection)
- e.g., A selects some value, propagate constraint to B and force C; then D decides based on D and forces E which backtracks and forces D and forces F
- then run backwards, F decides what value to take based on its forward pass; the improvement is that we do
- thus
- detects failure if the root (F) has no options
Cutset Conditioning: Graph -> Tree
- collapse a node that causes teh graph to not be a tree by giving it a value
- then create the tree by replacing the binary constraint with a unary constraint and run the above reduced arc consistency for each value that the collapsed node could take
- BUT, many nodes could be causing not-a-tree which mean at worst. we must remove almost all nodes (the cutset) - #
- NOTE: in this example, the problem is symmetric across all values, so no solution when we collapse SA to red means no solution at all
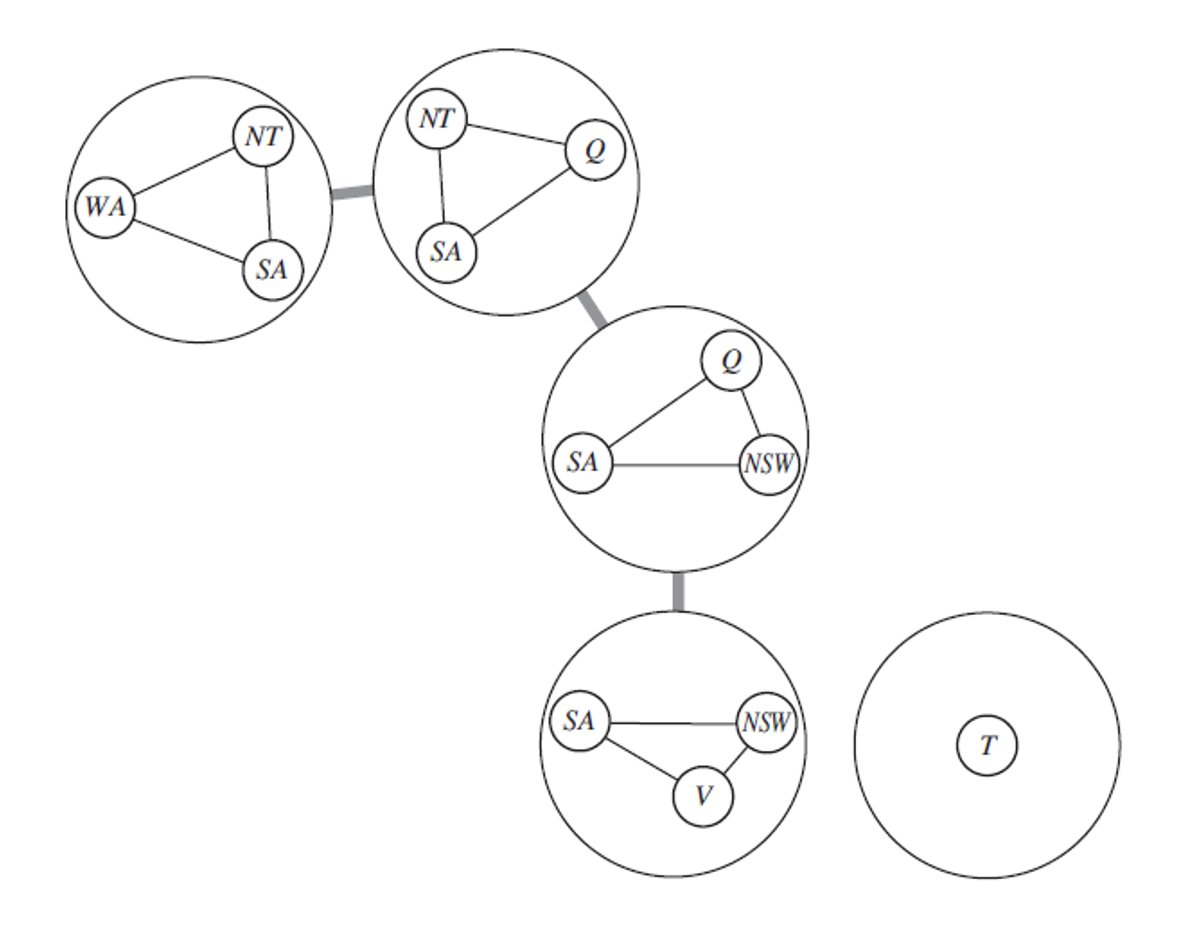
Tree Decomposition
- decompose into subtrees with shared constraints in each subtree
- then tie each of these subtrees as constraints of the other subtrees
- then intersect the solution space of each subtree
- then we must look at
- solved in